




UWB双向测距中双边双向测距和单边双向测距简介
2024-09-03 08:54
分享到:

在现代无线通信和定位系统中,双向测距需求的不断增加推动了多种测距技术的发展。无论是在工业自动化、智能建筑,还是资产管理等领域,能够精确测量设备之间的距离,对于确保系统的高效运行至关重要。双向测距的基本原理是通过两个设备之间的通信来测量它们之间的距离。然而,根据通信方式的不同,双向测距技术分为单边双向测距(SS-TWR)和双边双向测距(DS-TWR)两种。这两种测距方法目前用的比较多的是基于UWB技术实现,在具体实现复杂度和应用场景上各有不同。
单双边定义:从简单往返到多次交互
双向测距从字面意思很好理解,双向测距是测量两个设备之间距离的一种方法。简单来说,它通过两个设备互相发送信号来计算它们之间的距离。通俗点说,双向测距就是让两个设备互相“打招呼”,通过“打招呼”花的时间来判断它们之间的距离。比起单向测距来说,因为互相通信,测量的结果会更准确,不太容易出错。
那单边双向测距和双边双向测距怎么理解其中的“单边”和“双边呢”?在测距技术中,“单边”和“双边”是用来描述信号传输方向和测距过程的术语。
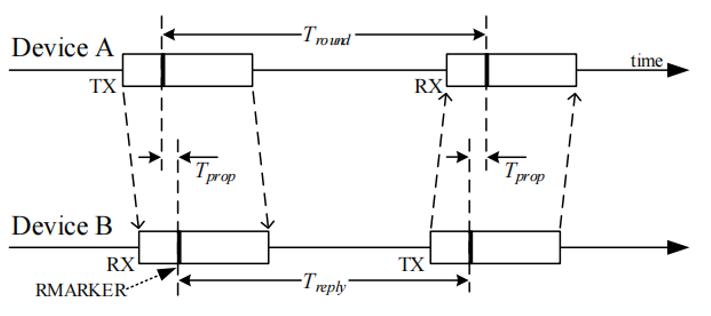
单边双向测距是基于一次信号往返的测距方法。其工作原理相对简单:发起设备(TX)向目标设备(RX)发送一个测距请求信号,目标设备接收到请求后立即发送应答信号回到发起设备。发起设备通过记录信号的发送时间和接收时间,计算出信号的总往返时间,并以此推断出设备之间的距离。在SS-TWR中,测距精度的高低依赖于设备之间的时钟同步情况和信号往返时间的精确测量。由于只有一次通信往返,因此其实现简单,速度快,但也容易受到时钟同步误差和环境干扰的影响。
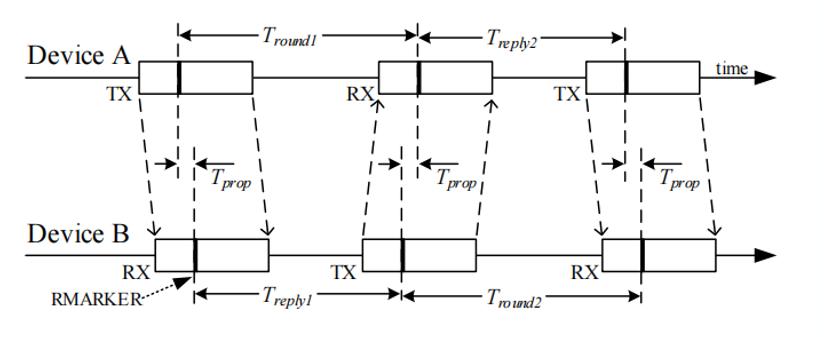
双边双向测距则是在SS-TWR基础上的进一步发展。DS-TWR通过两次或多次信号往返,消除由于时钟偏移或漂移引起的误差。测距过程通常如下:发起设备(TX)发送测距请求信号到目标设备(RX),目标设备在处理后返回应答信号。接着,发起设备再次发送信号,并等待目标设备的第二次应答。通过两轮通信往返,发起设备可以精确计算出信号的往返时间(ToF),并最终得出设备间的精确距离。
这里所说的两种测距可以根据公式计算其发起设备和目标设备信号往返的飞行时间,然后根据光速(使用光速是因为无线电信号在空气中传播的速度非常接近光速)乘以这个往返信号的飞行时间。这里对于具体的数据推导不作过多讨论,我们要知道的是DS-TWR通过双向通信实现了更高的测距精度,特别是在复杂、多径的环境中,其抗干扰能力和测距稳定性远超SS-TWR
单边双向与双边双向比较:精度、速度与抗干扰能力的权衡
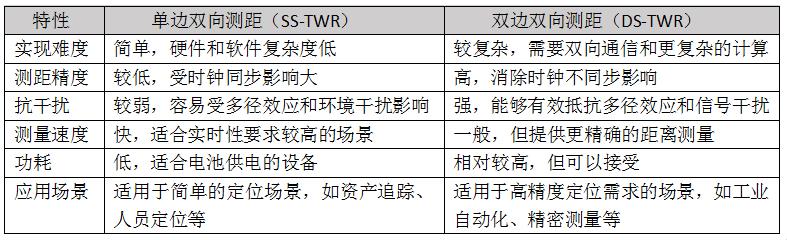
SS-TWR仅需要一次通信往返,硬件和软件的实现相对简单,且因一次往返通信所以测量速度快且功耗较低,适合对成本和开发周期有严格要求的场景。但由于信号只进行一次往返,时钟同步误差和环境干扰对测距精度的影响较大。
DS-TWR通过双向通信消除了时钟偏移的影响,测距精度显著提高,通常能达到厘米级别。
双向、多次通信使得DS-TWR在多径和复杂环境中依然能够保持高精度,适用于工业自动化等高精度要求的场景。
所以在对比SS-TWR和DS-TWR时,核心在于如何在测距精度、实现复杂度、功耗和环境适应性之间进行平衡。
在需要高精度定位(如工业自动化、精密测量等),且应用场景复杂、干扰较多,DS-TWR无疑是最佳选择。其高精度和强抗干扰能力能够满足严格的定位需求。
双边双向测距(DS-TWR)和单边双向测距(SS-TWR)在测距精度、抗干扰能力和实现复杂度上各有优劣。DS-TWR通过多次双向通信,实现了更高的测距精度,适用于要求严苛的场景;而SS-TWR则以其简单、快速的特点,在需要低功耗和快速响应的应用中表现出色。理解这两种测距方法的技术理论和特点,有助于选择最适合特定应用场景的测距技术,从而提升系统的整体性能。

0755-23080616

sales@nicerf.com

深圳市宝安四十三区鸿都商务大厦A栋三楼309-315
在线留言

0755-23080616

sales@nicerf.com

深圳市宝安四十三区鸿都商务大厦A栋三楼309-315
© 2026 深圳市思为无线科技有限公司 粤ICP备11103632号-1